Submitted by Vanessa Bismuth on Thu, 13/03/2025 - 11:37
Inspired by how brainless lifeforms such as starfish and slime moulds move around, physicists have constructed ‘odd’ objects that autonomously roll, crawl and wiggle over unpredictable terrain, including uphill and over obstacles placed in their way. This solves a key problem of robotic locomotion.
Locomotion, the ability of moving from one place to another, is an essential survival strategy for a large variety of living systems. Adapting to the unpredictable terrain they run into, cells, fungi and microorganisms autonomously move and change shape to explore their environments, while animals run, crawl, slither, roll and jump.
Despite advances in computing power and AI, human-made robots still struggle to imitate this movement, especially in new and unpredictable terrain. This prompts the question: what does it take to recreate the same adaptive locomotion capabilities that animals and other lifeforms have?
In answer to this question, an international team of physicists from the University of Amsterdam, the University of Chicago and the University of Cambridge showcase a series of ‘odd’ objects – each a type of so-called ‘active metamaterial’ [1] – that are remarkably good at moving across any terrain they encounter. Each object is made from the same motorised building blocks, which can sense forces and exert them on one another. The research has recently been published in Nature.
A wormlike ‘odd chain’ of linked building blocks will wiggle through a bendy tunnel and over uneven ground. Loop a chain into an ‘odd wheel’ and it will bouncily roll itself forward, including uphill and over bumpy terrain. Similarly, an ‘odd ball’ made of the building blocks connected in a hexagonal grid will roll on flat terrain but changes to a crawling gait to move uphill.
Impressively, the odd objects achieve all their motion autonomously, without steering or being controlled by a central processing unit or ‘brain’. The motion comes from the unusual interactions between the objects’ motorised building blocks.
“The building blocks exert forces that are nonsymmetric and nonreciprocal,” explained Jonas Veenstra, PhD student at the University of Amsterdam and first author of the publication. “This means that a building block A reacts to its neighbouring building block B differently than how B reacts to A. Collectively, as a structure connected by elastic springs, these energy-consuming building blocks form an ‘active’ solid that deforms in a counterintuitive way.”
Unlike ordinary elastic materials, which compress along the same direction as an applied force and bulge out in the perpendicular direction, the objects made of these building blocks always stretch diagonally at a fixed angle. This strange response was recently formulated and dubbed ‘odd elasticity’.
A cycle emerges where the terrain deforms the object, which the object’s building blocks sense and respond to in an odd way, thereby deforming the object further so that it moves forward and encounters new terrain.
With gravity pulling downwards, an odd wheel stretches diagonally on a surface, thereby tipping and rotating. After rotating, gravity again causes it to stretch at an angle and the process repeats. And thanks to the ‘wiggliness’ of the wheel’s forward motion, the odd wheel can easily overcome bumps or other unevenness on the road.
While the odd objects might look a bit silly as they move, their wiggly motion should not be confused for randomness. Their locomotion is reliable and robust thanks to their decentralised nature – each building block contributing to the movement – and thanks to the fact that the solids actively sense and respond to their environment.
"It is exciting that odd and non-reciprocal mechanics has advanced from first theoretical predictions to experimental realisations in robotics,” said Dr Anton Souslov, Associate Professor at the Cavendish Laboratory, University of Cambridge, who took part in this research. “A surprise is that these bioinspired robots have such robust motion over uneven terrain, despite being engineered in a decentralised way from fairly simple components.”
The research connects to the broader attempt to bridge the gap between materials and machines. “Active matter has long held the promise of having useful applications, but active materials have proven difficult to tame,” said Corentin Coulais, Lab Leader at the University of Amsterdam. “Our new designs make active solids functional, enabling a paradigm shift in robot locomotion.
“This first demonstration of locomotion in odd solids opens up the way for future exciting science and engineering, from fundamental questions about what new functionalities are possible to how to exploit these robots in everyday technologies," concluded Souslov.
Reference:
Veenstra, J., Scheibner, C., Brandenbourger, M. et al., ‘Adaptive locomotion of active solids’. Nature (2025). DOI:10.1038/s41586-025-08646-3
Image:
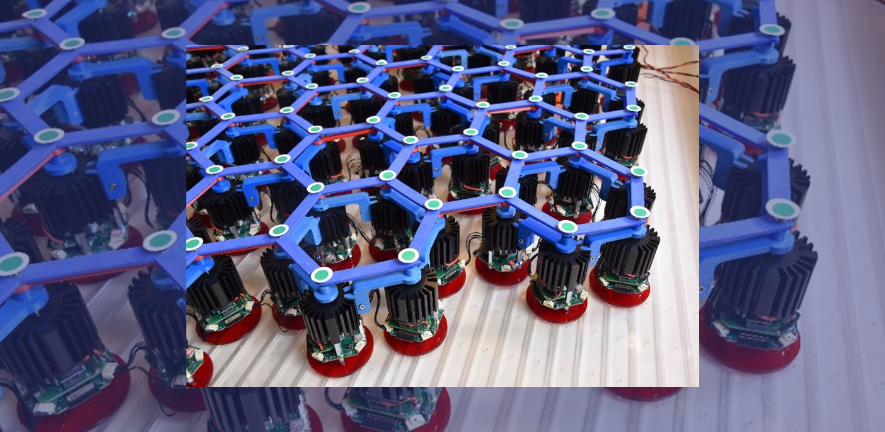
‘Odd’ building blocks linked together in a hexagonal pattern. Credit: Jonas Veenstra.
Video:
Odd objects move across any terrain, crawl uphill and roll on flat terrain. Credit: Jonas Veenstra.
[1] A metamaterial is a human-made structure, usually composed of repeated building blocks, that is designed to have physical properties (mechanical, optical or otherwise) that are different from the natural properties of the underlying materials. An active solid is a solid object made of components that consume energy, for instance by being motorised. An active metamaterial is both a metamaterial and an active solid.